Powered by  Translate
Translate
 Translate
Translate

Akım çıkışı 1. Kısa Tanıtım
1.1 Genel Bakış
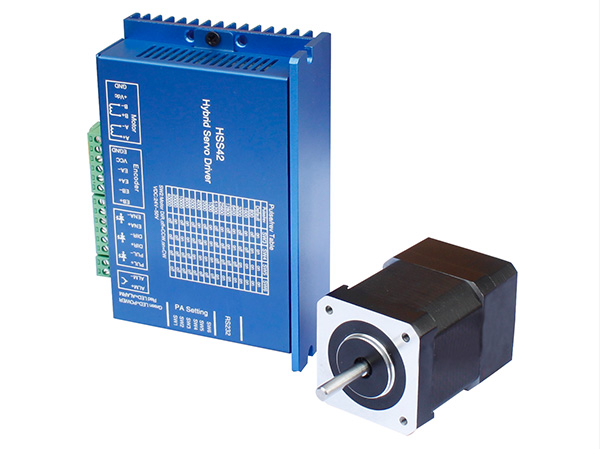
3HSS2260, hibrit yüksek güçlü step servo sürücüdür. 86(NEMA34) ve 110(NEMA42) üç fazlı step motora uyar. Geleneksel açık döngü step sürücü ile karşılaştırıldığında, bu step servo sürücü, step motor kayıp adım problemini tamamen önleyebilir, yüksek hızlı tork düşüşü, açık döngü step sürücüsünden son derece düşüktür, yüksek hızlı motorun performansını ve torkunu büyük ölçüde artırır. . Sürücü akımı yüke göre otomatik olarak kontrol edilebilir, motorun sıcaklık artışını etkili bir şekilde dizginler, motorun çalışma ömrünü uzatır. Yerleşik konum ve alarm sinyali çıkışı, ana bilgisayarın motor çalışma durumunu izlemesi ve kontrol etmesi için uygundur. Aşırı konum hatası alarmının işlevi, ekipmanın güvenli bir şekilde çalışmasını sağlar. Geleneksel açık döngü sürücüsünün ideal bir şekilde değiştirilmesi ve yükseltilmesidir ve ayrıca AC servo sisteminin parça işlevleriyle birlikte, fiyat AC sisteminin sadece yarısıdır.
1.2 Özellikler
★ 32-bit DSP ve vektör kapalı çevrim kontrol teknolojisi
★ Kademe kaybetmeden, pozisyonda yüksek doğruluk
★ Motor çıkış torkunu ve çalışma hızını iyileştirin
★ Değişken akım kontrol teknolojisi, motor sıcaklık artışını dizginler
★Çeşitli mekanik yük koşullarına uyum sağlayın (düşük rijitlikteki kasnaklar dahil), kazanç parametresini ayarlamaya gerek yok
★ Pürüzsüz ve güvenilir hareket, düşük titreşim, hızlanma ve yavaşlamada büyük gelişme
★ Titreşimsiz sıfır hız statik yeteneği
★3 fazlı 86(NEMA34) ve 110(NEMA42) hibrit servo motora uyum
★ Maksimum adım darbe frekansı 200KHZ
★ Mikro adım 200-65535 darbe/devir
★ Gerilim aralığıAC150-220V
★ Aşırı akım, aşırı gerilim ve aşırı konum koruması
★ Altı dijital tüp ekran, parametrelerin ayarlanması ve motorun çalışma durumunu izlemesi kolay
1.3Uygulamalar
Gravür makinesi, dikiş makinesi, tel sıyırma makinesi, markalama makinesi, kesme makinesi, lazer fotoğraf oluşturma makinesi, çizim aleti, sayısal kontrol makinesi aracı, otomatik montaj ekipmanı gibi büyük tork gerektiren otomasyon ekipmanı ve enstrümantasyon için uygundur. ve bunun gibi. Az gürültü ve yüksek hız ile ekipmanda iyi performansa sahiptir.
2. Teknik İndeks
Giriş gerilimi | AC150~220V (Tipik olarak 220VAC kullanın) |
Akım çıkışı | Tepe 6.0A (yüke göre mevcut değişken) |
Lojik Akım Girişi | 7~20mA |
Sıklık | 0~200KHz |
uygun motor | 3 fazlı NEMA34 ve NEMA42 hibrit servo motor |
Enkoder Çözünürlüğü | 1000 |
Yalıtım direnci | >=500MΩ |
2.2 Çevre Endeksi
Soğutma yöntemi | Doğal soğutma veya cebri hava soğutması |
Çalışma ortamı | Toz, yağ sisi ve aşındırıcı gazlardan kaçının |
Çalışma sıcaklığı | 0~50℃ |
Nem | %40~90BN |
Titreşim | 5,9m/sn 2 Maks |
Depolama Ortamı | -20℃~65℃ |
Ağırlık | Yaklaşık 1500g |
2.3 Mekanik Özellikler

3.Port Arayüzü
3.1 Güç Arayüzü Bağlantı Noktaları1
Liman | sembol | Tanım | Açıklama |
1 | L | Motor gücü Konektörü 220AC | |
2 | n | ||
3 | Kuzey Kore | Bağlı değil | |
4 | BR | Frenleme resistörü | Harici frenleme direnç bağlı Br ve P+ arasında |
5 | P+ | DC Bara Gerilimi |
3.2 Güç Arayüzü Bağlantı Noktaları2
Liman | sembol | Tanım | NEMA34 | NEMA42 |
1 | sen | Motor Bağlantı Noktası U | kırmızı | Siyah |
2 | V | Motor Bağlantı Noktası V | Siyah | kahverengi |
3 | W | Motor Bağlantı Portu W | Mavi | Mavi |
4 | PE | Zemin | Sarı | Sarı |
5 | L | Kontrolör gücü Bağlantısı 220VAC'ye | AC150-220V Aralığı | |
6 | n | |||
3.3 Kontrol Sinyali Arabirim Bağlantı Noktaları (44 Pinli DB)
Liman | sembol | Tanım | Açıklama |
3 | PUL+ | Darbe Sinyali Girişi + | |
4 | PUL- | Darbe Sinyal Girişi - | |
5 | DIR+ | Yön Sinyali Girişi + | |
6 | DIR- | Yön Sinyali Girişi - | |
7 | ALM+ | Alarm Sinyal Çıkışı + | |
8 | ALM- | Alarm Sinyal Çıkışı - | |
9 | BEKLEMEDE + | Konum Sinyali Çıkışı + | |
10 | BEKLE- | Konum Sinyali Çıkışı - | |
11 | ENA+ | Sinyal Girişini Etkinleştir + | |
12 | ENA- | Sinyal Girişini Etkinleştir - | |
23 | OA+ | Enkoder A Çıkışı | Enkoder A,B,Z Sinyali diferansiyel sürücü (26LS31) çıkış, izole edilmemiş çıkış. Eğer motor sadece A, B iki kanal kodlayıcı, ardından Z'yi yoksay kanal. |
24 | OA- | ||
25 | OB+ | Enkoder B Çıkışı | |
26 | OB- | ||
27 | OZ+ | Enkoder Z Çıkışı | |
28 | OZ- |
29 | CZ | Enkoder Z açık toplayıcı çıktı | |
30 | GND | Zemin |
3.3.1 Sinyal Çıkış Arayüzü Portları(Pend&ALM)
Pend ve ALM sinyal çıkış devresi Darlington optokuplör kullanır, röle veya optokuplör ile bağlanabilir. Aşağıdaki noktalara dikkat edin:
★ Yanıta veya optokuplöre güç sağlamak için bir güç kaynağı kullanın, güç kaynağı yanlış bağlanırsa sürücü yanacaktır.
★ Güç kaynağı Maksimum 25VDC, Maksimum akım 50mA.
★ Röle gibi endüktif yük kullanılıyorsa diyot endüktif yüke paralel olmalıdır ve diyotun polaritesi ters çevrilirse sürücü zarar görür.
★ Açıldığında yaklaşık 1V basınç düşüşü olur, TTL düşük seviye gereksinimlerini karşılayamaz, dolayısıyla TTL akımına bağlanamaz.

3.3.2 Sinyal Girişi Arayüz Portları(PUL, DIR, ENA)
★ Diferansiyel Sinyal Bağlantıları

★ Ortak Anot Bağlantıları

★ Ortak Katoda Bağlantılar

5V sinyal girişi. 12V sinyal girişi varsa, ek 1KΩ direnç bağlanması gerekir. 24V sinyal girişi varsa, Ek 2KΩ direnç bağlanması gerekir.
3.4 Enkoder Sinyal Girişi Arayüz Portları (15 Pin DB)
Liman | sembol | Tanım | Açıklama |
1 | EA+ | Enkoder A+ Girişi | Motor sadece A, B ile iki kanal kodlayıcı, ardından Z'yi yoksay kanal. |
11 | EA- | Enkoder A- Girişi | |
2 | EB+ | Enkoder B+ Girişi | |
12 | EB- | Enkoder B- Giriş | |
7 | EZ+ | Enkoder Z+ Girişi | |
8 | EZ- | Enkoder Z- Girişi | |
13 | VCC | +5V | |
3 | GND | Zemin |
3.5 RS232 İletişim Arayüzü Portları
Liman | sembol | Tanım |
1 | Kuzey Kore | Bağlı değil |
2 | +5V | Harici HISU için |
3 | TxD | RS232 İletim Bağlantı Noktası |
4 | GND | Zemin |
5 | RxD | RS232 Alıcı Bağlantı Noktası |
6 | Kuzey Kore | Bağlı değil |
4. Kablolama
4.1 Tipik Sıkma Şeması

5. Parametreler
5.1 Parametre Yapılandırma
kod | Tanım | Menzil | Varsayılan değer | Açıklama |
PA0 | Göstergedeki güç | 0~7 | 0 | |
PA1 | Kontrol Modu Seçimi | 0~1 | 1 | 0-Açık döngü, 1=Kapalı döngü |
PA2 | Mevcut Döngü Kp | 1000 | Değiştirilmesi Yasak | |
PA3 | Geçerli Döngü Ki | 200 | Değiştirilmesi Yasak | |
PA4 | Konum Döngüsü Kp | 0~1000 | 300 | |
PA5 | Hız Döngüsü Kp | 0~1000 | 400 | |
PA6 | Hız Döngüsü Ki | 0~300 | 80 |
PA7 | Mikro Adım Ayarı | 200~65535 | 4000 | |
PA8 | Enkoder Çözünürlüğü | 4000 | 1000 satır (4 kez) | |
PA9 | Konum Hata Sınırı | 40~65535 | 1000 | |
PA10 | Mevcut Yüzde Tutma | 0~80 | 30 | Birim: 100MA |
PA11 | Kapalı Çevrim Akımı Yüzde | 1~80 | 60 | Birim: 100MA |
PA12 | Motor Tipi Seçimi | 0-2 | 0 | seçmene gerek yok |
PA13 | Filtreleme Süresi | 0~1500 | 60 | Birim: 66.7μs |
PA14 | Seviyeyi Etkinleştir | 0/1 | 1 | |
PA15 | Alarm Seviyesi | 0/1 | 0 | |
PA16 | Darbe Modu Seçimi | 0/1 | 0 | 0-PUL/DIR 1-CW/CCW |
PA17 | Darbe Kenarı | 0/1 | 0 | |
PA18 | Motor Dönüş Yönü | 0/1 | 0 | |
PA19 | JOG Hızı | 1~600 | 120 | Birim: rpm |
PA20 | PEND Modu Bölümü | 0/1 | 0 | |
PA21 | BEKLEMEDE Düzey | 0/1 | 0 | |
PA22 | Hızlanma | 1~2000 | 200 | Birim: r/s^2 |
PA23 | yavaşlama | 1~2000 | 200 | Birim: r/s^2 |
5.2 Parametre Açıklaması
kod | Tanım | Tanım | Menzil |
PA0 | Göstergedeki güç | Sürücü açıldığında, ekran şunları gösterir: ★ 0:Konum izleme hatası ★ 1:Motor hızı ★ 2: Verilen hız ★ 3:Geri Bildirim Darbesi ★ 4:Verilen Nabız ★ 5:Verilen Akım ★ 6:Hata kodu ★ 7:Bara gerilimi | 0~7 |
PA1 | Kontrol Modu Seçimi | ★ 0: Açık çevrim Modu: sadece sinyal girişinden gelen sinyaller bağlantı noktaları, motor açık döngü sürücü tarafından kontrol edilir. Motor akımı holdinge bağlı akım(PA10) ★ 1: Kapalı çevrim modu: Alma her ikisi de sinyal girişinden gelen sinyaller bağlantı noktaları ve kodlayıcı, motor pozisyon tarafından kontrol edilen kapalı döngü | 0~1 |
sürücü. Motor akımı otomatik yüke göre değişir | |||
PA2 | Mevcut Döngü Kp | Değiştirilmesi Yasak | |
PA3 | Geçerli Döngü Ki | Değiştirilmesi Yasak | |
PA4 | Konum Döngüsü Kp | ★ Değer ayarı ne kadar yüksekse, o kadar yüksek kazanç ve daha büyük sertlik ve aynı altında daha küçük konum gecikmesi frekans komutu darbe koşulu. Ama çok büyük değer, neden olabilir salınım kararsız sistem. Değer ayar yüke bağlıdır. | 0~1000 |
PA5 | Hız Döngüsü Kp | 0-1000 | |
PA6 | Hız Döngüsü Ki | 0-300 | |
PA7 | Mikro Adım Ayarı | 200-65535 | |
PA8 | Enkoder Çözünürlüğü | ★ kodlayıcı hattı 1000 satırdır, PA8 varsayılan değer kodlayıcının 4 katıdır çizgiler | |
PA9 | Konum Hata Sınırı | ★ Kapalı çevrim ve JOG modunda, eğer konum hatası ayarı aşıyor değer, sürücü pozisyona girecek hata alarmı. | 40~65535 |
PA10 | Tutma Akımı | ★ Tutma akımı=ayar değer*100MA | 0~80 |
PA11 | Kapalı Çevrim Akımı | ★ Kapalı çevrim akımı=ayar değer*100MA | 1~80 |
PA12 | Motor Tipi Seçimi | Gerek yok Seçme | |
PA13 | Filtreleme Süresi | Filtreleme Süresi=ayar değeri*66.7μs | 0-1500 |
PA14 | Seviyeyi Etkinleştir | ★ 0:ENA giriş optokuplörü transistör KAPALI (kesilmiş), motor etkinleştirme; ENA giriş optokuplörü transistör AÇIK (iletken), motor Bedava. ★1:ENA giriş optokuplörü transistör AÇIK (iletken), motor etkinleştirme; ENA giriş optokuplörü transistör KAPALI (kesilmiş), motor serbest. | 0~1 |
PA15 | Alarm Seviyesi | ★ 0:Alarm olduğunda, çıkış optokuplörü transistör AÇIK (iletken); Ne zaman normal çalışma, çıkış optokuplörü transistör KAPALI (kesilmiş) ★ 1: Alarm olduğunda, çıkış optokuplörü transistör KAPALI (kesilmiş); Ne zaman | 0~1 |
normal çalışma, çıkış optokuplörü transistör AÇIK (iletken) | |||
PA16 | Darbe Modu Seçimi | ★ 0:PUL/DIR modu ★ 1:Sağ/Sağ modu | 0~1 |
PA17 | Darbe Kenarı | ★ 0:Normal ★ 1:Giriş komutu darbesi geri polarite | 0~1 |
PA18 | Motor Dönüş Yönü | ★ 0:motorun saat yönünde dönüşü ★ 1:Saat yönünün tersine dönüş | 0~1 |
PA19 | JOG Hızı | 1~600 | |
PA20 | PEND Modu Bölümü | ★ 0:PEND pozisyon çıkış sinyali olarak. ★ 1:Fren çıkış sinyali olarak PNED. | 0~1 |
PA21 | BEKLEMEDE Düzey | ★ 0:Konumlandırma veya frenleme sırasında Tamam, çıkış optokuplör transistörü AÇIK (iletken); aksi takdirde çıktı optokuplör transistörü KAPALI (kesilmiş) ★ 1: Konumlandırma veya frenleme sırasında Tamam, çıkış optokuplör transistörü KAPALI (kesilmiş); aksi takdirde çıktı optokuplör transistörü AÇIK (iletken) | 0~1 |
PA22 | Hızlanma | Birim: r/s^2 | 1-2000 |
PA23 | Yavaşlama | Birim: r/s^2 | 1-2000 |
6. Alarm Fonksiyonu
6.1 Alarm Yapılandırması
ALM Kodu | Alarm Tanımı | Tanım |
-- | Çalışıyor | |
1 | aşırı akım | Motor akımı çok yüksek |
2 | aşırı voltaj | Ana devre güç voltajı çok yüksek |
3 | Konum sapması hatası | Konum sapması ayarlanan değeri aşıyor. |
4 | EEPROM hatası | EEPROM hatası |
6.2 Alarmları İşleme Yöntemi
ALM Kodu | Alarm Tanımı | Sebep | İşleme metodu |
1 | aşırı akım | Sürücü U, V, W kısa devre. | Kablolamayı kontrol edin. |
topraklama sorunu | Zemini kontrol edin. | ||
Motor yalıtımı hasarlı | Yenisini değiştir motor. | ||
Sürücü hasarlı | Yenisini değiştir sürücü. |
2 | Aşırı Gerilim | Güç açıldığında, voltaj çok yüksek veya çok düşük. | Girişi kontrol edin güç. |
Fren direnci kablolaması aniden bağlantı kesildi motor çalışıyor. | Tekrar kablolama. | ||
Fren direnci veya frenleme transistörü hasarlı. | Yenisini değiştir sürücü. | ||
3 | Konum sapması hatası | Kontrol gücü açıldığında açık, devre kartı hasarlı. | Yenisini değiştir sürücü. |
Motor U, V, W yanlışsa sıkma veya kodlayıcı yanlış sıkmak, motor olacak ters çalışan veya değil Çalışma, | Tekrar kablolama. | ||
Enkoder hasarlı | Yenisini değiştir sürücü. | ||
Konum sapma değeri aralığı çok küçük. | artırın konum sapması değer aralığı. | ||
Konum döngüsü Kp çok düşük. | artırın pozisyon döngüsü Kp değer. | ||
Yetersiz tork. | Yükü azaltın veya daha yüksek değiştir tork motoru. | ||
Komut darbe frekansı çok yüksek. | azaltmak Sıklık. | ||
4 | EEPROM hatası | Çip veya Devre kartı hasarlı. | Yenisini değiştir sürücü. |
müdahale var okuma süreci ve EEPROM'u yazmak. | Varsayılanı geri yükle parametreler. |
7. Ekran ve Panel
Panel, 6 LED dijital tüp ekran ve 5 düğmeden oluşur
←、↑、↓、S(Shift)、ENT dahil.
'←': Çıkış veya İptal
'↑': Arttır veya İleri
'↓': Azaltma veya Önceki
'S': Sola kaydırma rakamları

ENT': Girin veya Onaylayın
7.1 Ana Menü Ekranı
Çalışma modu ana menüden seçilir. 4 çalışma modu vardır: izleme modu, parametre ayarı, parametre yönetimi ve JOG modu. Modu değiştirmek için ↑ ve ↓ düğmesine basın, alt menüye girmek için ENT düğmesine basın, ana menüye geri dönmek için ← düğmesine basın.

7.2 Alt Menü Ekranı
7.2.1 İzleme Modu
Ana menüden 'dP-'yi seçin, monitör moduna geçmek için ENT düğmesine basın. 8 ekran durumu vardır, durumu seçmek için ↑ ve ↓ düğmesine basın, tam değeri göstermek için ENT düğmesine basın.

7.2.2 Parametre Ayarı
Ana menüden 'PA-' seçin, parametre ayar moduna geçmek için ENT düğmesine basın. PA01'den PA23'e 23 parametre kodu vardır, parametre kodunu seçmek için ↑ ve ↓ düğmelerine basın, parametre değerini göstermek için ENT düğmesine basın. ↑ ve ↓ düğmesine basın, değerleri değiştirebilir. S düğmesi rakamları bırakabilir ve parlayan rakamı artırmak veya azaltmak için ↑ ve ↓ düğmelerine basın. ENT düğmesine basın, değişikliği onaylayabilir. Değiştirilen değeri karşılamıyorsanız, orijinal değere geri dönmek için ← düğmesine basmak yerine ENT düğmesine basmayın.

7.2.3 Parametre Yönetimi
Parametre yönetimi, esas olarak parametre yapılandırması ve EEPROM arasındaki işlemi işler. Ana menüden 'EE-' seçin, parametre yönetim moduna geçmek için ENT düğmesine basın. 3 mod vardır: EE-Set, EE-rd ve EE-dEF.
EE-Set: 'parametre yazma', parametreleri EEPROM alanına yazmak anlamına gelir. Kullanıcılar yalnızca parametreleri değiştirir, ancak EEPROM alanına yazmazlarsa, değiştirilen parametre saklanmaz, bir sonraki açılışta orijinal değeri geri yükleyecektir. Ancak parametre EEPRPOM alanına yazılırsa, bir sonraki açılışta değiştirilen değer olacaktır.
EE rd: 'parametre okuma', EEPROM alanındaki parametrenin RAM alanına okunması anlamına gelir. Bu işlem güç verildiğinde bir kez yürütülecektir. Başlangıçta RAM alanının parametre değeri EEPROM alanındaki ile aynıdır. Ancak kullanıcı parametreleri değiştirdiğinde, RAM alanı parametre değerlerini değiştirecektir. Kullanıcı değiştirilen değerlerden memnun değilse veya parametre değerleri bozulursa, parametre okuma işlemi EEPROM alanındaki parametreyi tekrar RAM alanına okuyabilir.
EE-dEF: 'fabrika ayarlarına sıfırlama', varsayılan değeri RAM alanına geri yüklemek ve bu arada EEPROM alanına yazmak anlamına gelir. İşlem, kullanıcılar parametreleri bozduğunda ve düzgün çalışamadığında kullanılabilir.
Örnek olarak EE-Set'i alın: EE-Set modunu seçin, ENT düğmesine basın ve 3 saniye basılı tutun, ekranda 'Start' gösterilir, bu, parametrelerin EEPROM'a yazıldığı anlamına gelir, 1-2 saniye sonra, eğer EE- Ayar işlemi başarılıdır, ekranda 'Bitti', işlem başarısız olursa ekranda 'Hata' gösterilir. ← düğmesine basıldığında ana menüye dönülebilir.

7.2.4 JOG Modu
JOG modu: PA1=2 olarak ayarlayın, kontrol modunun JOG modu olmasına izin verin. JOG hızını PA19 ile ve JOG hızı hızlanma ve yavaşlamayı PA22 ve PA23 ile ayarlayın. Ana menüde JOG modunu seçin. ↑düğmesine basın ve basılı tutun, motor JOG hızında çalışacak, Düğmeyi ↑ bırakın, motor duracak ve 0 hızda tutacaktır. ↓ düğmesine basın ve basılı tutun, motor ters yönde çalışacaktır. Düğmeyi ↓ bırakın, motor durur ve 0 hızda kalır.
İnternet sitesi
Ürün:% s
Bize Ulaşın
mobil